
SC001 – Come usare i motori passo passo
Da anni nei mercatini e fiere dell’ elettronica si trovano facilmente dei motori passo passo (o bifasi), questi motori sono molto usati all’ interno di stampanti, scanner e alti apparecchi digitali accoppiati a PC, ma anche in frese CNC e stampanti 3D.
Questi motori particolari pur essendo in continua, non è possibile pilotarli direttamente con tensioni di 3, 5, 9 o 12V, ma richiedono un particolare circuito di pilotaggio che alimenta le bobine interne in modo ben definito.

noltre a differenza dei motori a spazzola (dove la commutazione sull’ alimentazione degli avvolgimenti, avviene tramite il collettore) non essendo presente nessun contatto strisciante ne altro sistema di commutazione, la sequenza di eccitazione delle bobine deve essere svolta esternamente attraverso transistor o mosfet.

All’ interno di questi motori, a differenza di quelli a spazzola, i magneti permanenti si trovano sul rotore centrale, invece che sullo statore, mentre gli avvolgimenti so trovano sullo statore come i motori trifasi in AC, solo che questi ultimi, non hanno magneti permanenti nemmeno sul rotore.
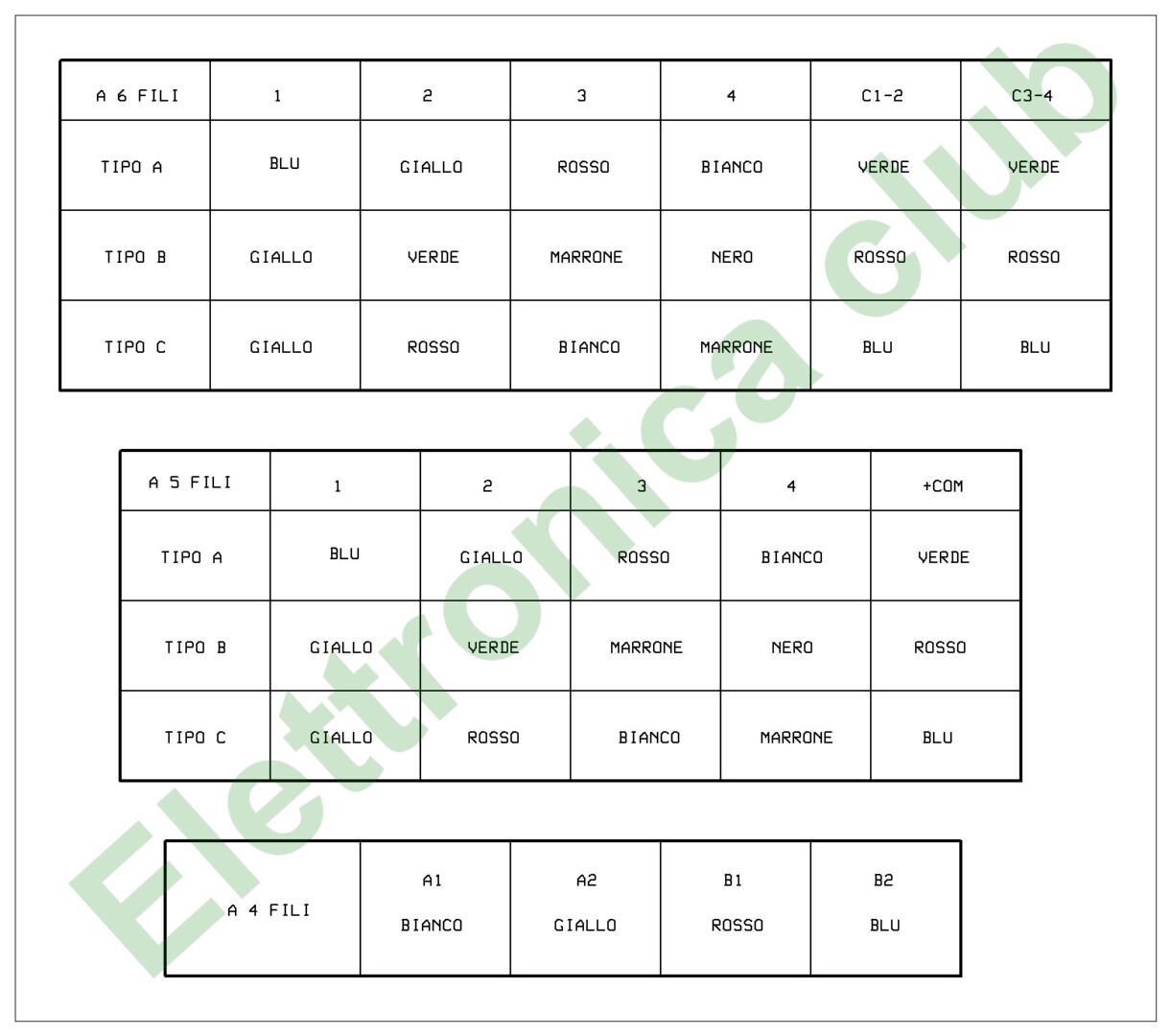
Nel disegno precedente abbiamo raffigurato un motore passo passo in modo generico e nelle versioni a 6 terminali esterni (con C1-2 e C3-4) e a 5 terminali (un comune unico), mentre nel disegno successivo abbiamo raffigurato pure quelli a 4 terminali, in questo caso le bobine devono essere alimentate seguendo una logica diversa .

Inoltre a differenza dei motori a spazzola, dove la coppia e la potenza cambiano col variare dei giri dell’ albero, nei motori passo passo la coppia motrice è alta fin dalla partenza e la potenza erogata è massima anch’ essa fin da zero giri, però è anche vero che i motori passo passo hanno un regime di rotazione molto inferiore sia ai motori a spazzola che ai brushless, infatti questi motori sono in grado di girare al massimo a 800-1000 giri, contro quelli a spazzola che possono raggiungere i 60000 giri o i brushles del tipo usati in modellismo aeronautico che spesso raggiungono i 70000 giri e che essendo privi di contatti striscianti e bassa isteresi magnetica, non fanno rumori ronzanti come quelli a spazzola (che spesso li rendono simili ai 2 tempi o ai wankel) ma sibilano come una vera e propria turbina a gas.

A tale proposito sono molto usati grazie al basso peso e alla potenza elevata che li fanno preferire alle turbine a gas vere e proprie che hanno un costo molto elevato e richiedono di molta manutenzione.
Il fatto di lavorare a temperature basse (e non oltre i 1000°C come i gas di scarico di una turbina), ha permesso la realizzazione di veri e propri aerei a turbogetto, ma con dimensioni e costi accessibili a tutti
Come detto precedentemente, quello che troviamo all’ interno di questi motori, lo riassumiamo così, infatti le bobine possono essere 4 o un multiplo di 4 e il rotore è composto da magneti permanenti che in base al numero di essi, è possibile determinare lo step (ovvero l’ angolo di giro) che questo motore compie a ogni impulso.
Esistono motori che necessitano di 8 impulsi per fare un giro completo, ma ne esistono anche altri che ne richiedono 16, 32, 64, e 128. questo permette di avere una migliore precisione meccanica, facendoli preferire a altri tipi di motore.
In più, è facile controllare la posizione del motore semplicemente dal numero di impulsi forniti, senza quindi alcun tipo di finecorsa o encoder.
Nella tabella qui riportata, abbiamo messo alcuni tipi di motore tra i più usati:
Per pilotare questi motori esistono un’ infinità di circuiti (quasi tutti in SMD), ma purtroppo difficilmente reperibili sul mercato, uno di questi è l’ SAA1027, ma anche questo non facilmente reperibile e solo a prezzi elevati.

Per questo motivo noi abbiamo sviluppato alcuni circuiti realizzabili in maniera abbastanza facile, usando integrati C/MOS
Schema n: 1, per motori a 5 o 6 fili:
Questo circuito serve solo a pilotare quei motori con positivo comune che si riconoscono per il fatto di avere
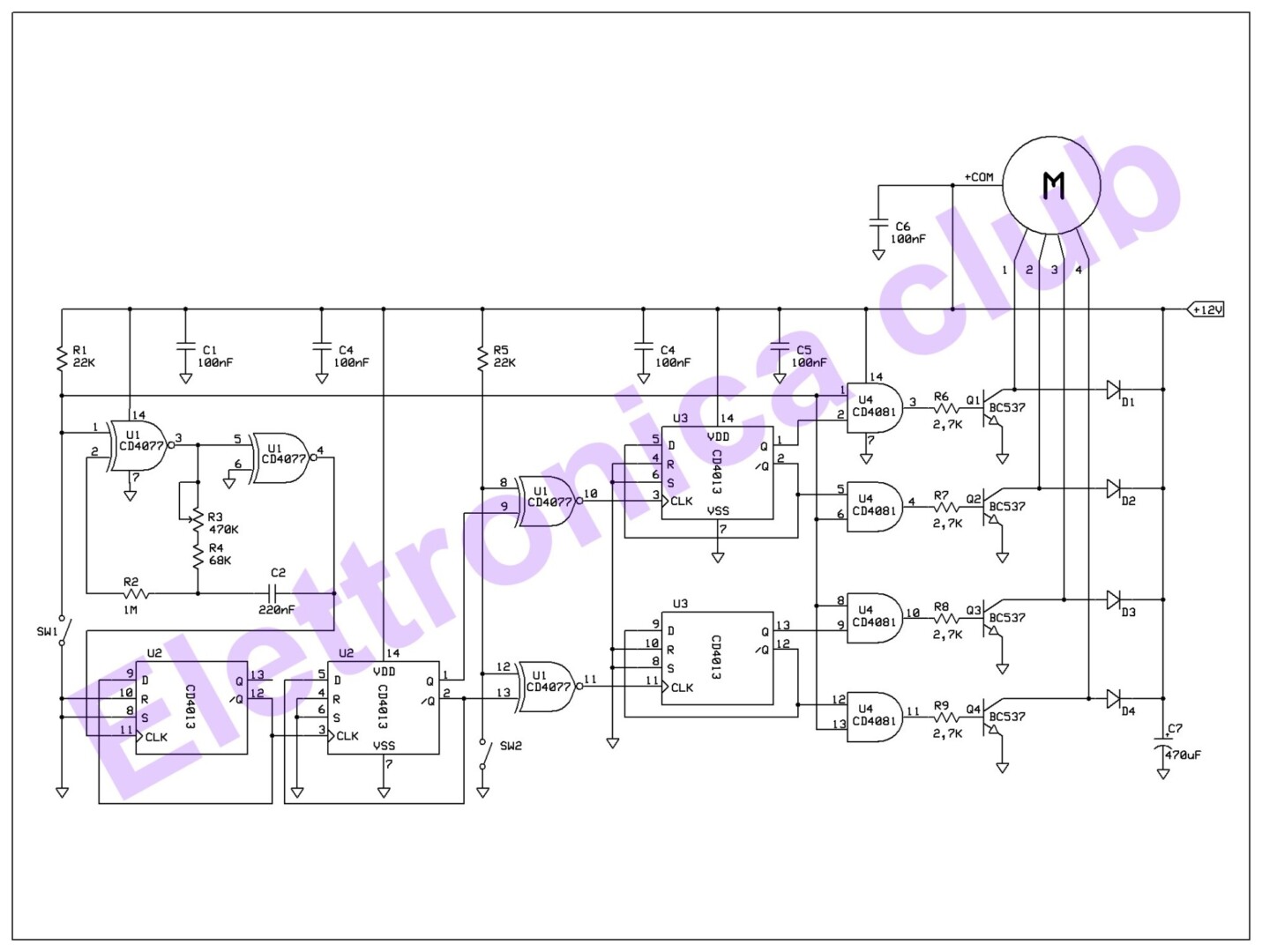
Elenco componenti 1°schema:
R1 = 22KΩ 0,25W
R2 = 1MΩ 0,25W
R3 = 470KΩ potenziometro
R4 = 68KΩ 0,25W
R5 = 22KΩ 0,25W
R6 = 2,7KΩ 0,25W
R7 = 2,7KΩ 0,25W
R8 = 2,7KΩ 0,25W
R9 = 2,7KΩ 0,25W
C1 = 100nF 25V ceramico
C2 = 100nF 25V ceramico
C3 = 220nF 50V poliestere
C4 = 100nF 25V ceramico
C5 = 100nF 25V ceramico
C6 = 100nF 25V ceramico
C7 = 470uF 16V elettrolitico
D1 – D4 = diodo tipo 1N4148
Q1 – Q4 = transistor NPN tipo BC537, BC337 o simili
U1 = Integrato C/MOS tipo CD4077
U2 = Integrato C/MOS tipo CD4013
U3 = Integrato C/MOS tipo CD4013
U4 = Integrato C/MOS tipo CD4081
Schema n: 2, per motori a 4 fili:
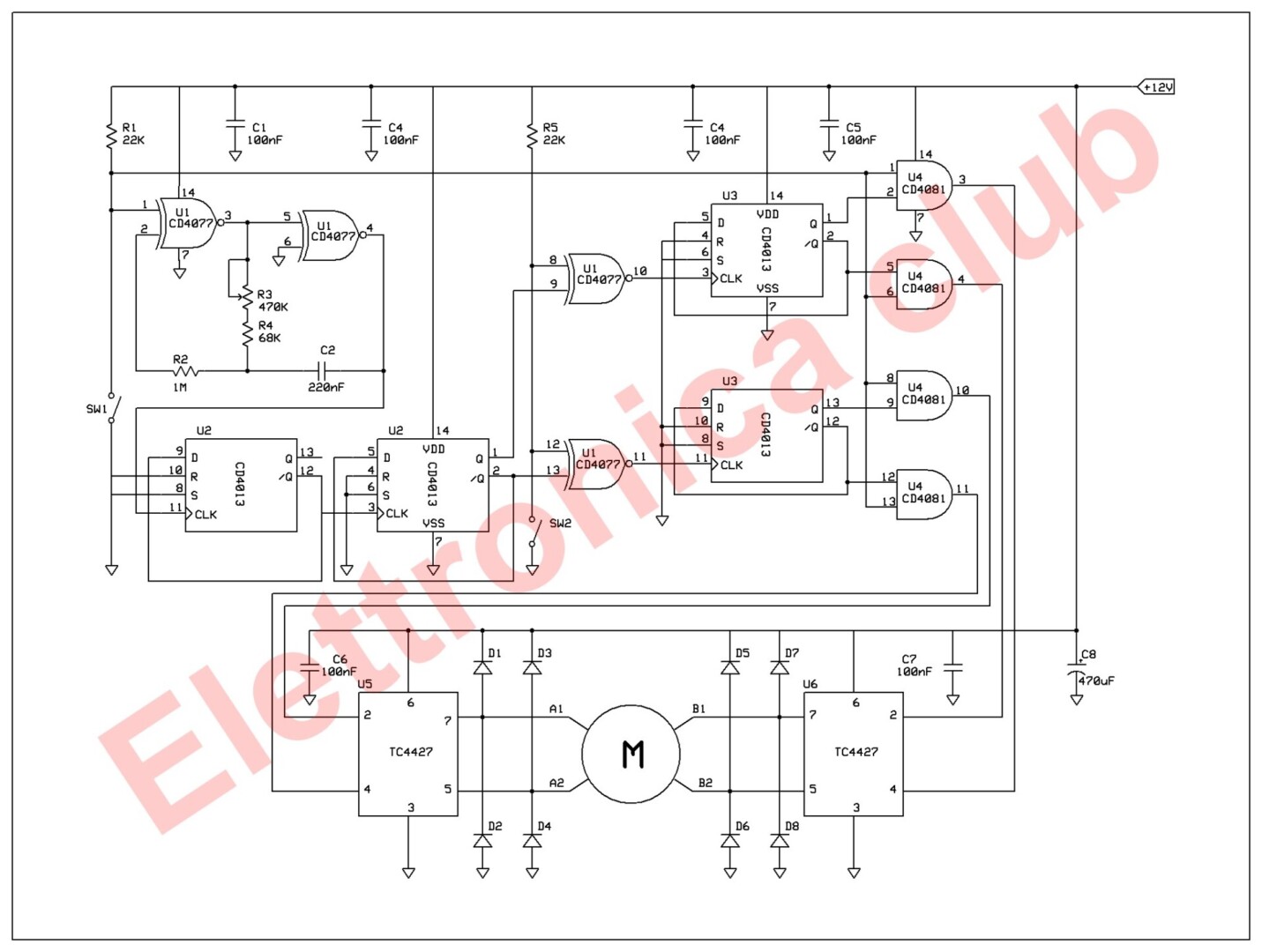
Elenco componenti 2°schema:
R1 = 22KΩ 0,25W
R2 = 1MΩ 0,25W
R3 = 470KΩ potenziometro
R4 = 68KΩ 0,25W
R5 = 22KΩ 0,25W
C1 = 100nF 25V ceramico
C2 = 100nF 25V ceramico
C3 = 220nF 50V poliestere
C4 = 100nF 25V ceramico
C5 = 100nF 25V ceramico
C6 = 100nF 25V ceramico
C7 = 100nF 25V ceramico
C8 = 100nF 25V ceramico
C9 = 470uF 16V elettrolitico
D1 – D8 = diodo tipo 1N4148
U1 = Integrato C/MOS tipo CD4077
U2 = Integrato C/MOS tipo CD4013
U3 = Integrato C/MOS tipo CD4013
U4 = Integrato C/MOS tipo CD4081
U5 = integrato tipo TC4427
U6 = integrato tipo TC4427
Applicazioni:
Questo tipo di motore, può essere applicato in tutte quelle cose dove è necessaria una coppia molto elevata partendo da zero, dove non è necessario un uso continuativo e prolungato e dove spesso sono richiesti movimenti brevi e precisi.

Nel modellismo può trova applicazione nelle piattaforme girevoli o negli scali merci dei plastici ferroviari, ma chi ha più fantasia (specialmente gli appassionati di Star Wars e Star Trek) potrebbero realizzare dei messi semoventi come quelli raffigurati qui di seguito:

