
Braccio Robotico con Arduino – Prima Parte
Braccio robotico con Arduino
Illustrazione e guida alla costruzione
Al giorno d’oggi l’attività manuale dell’uomo viene sempre più decurtata e viene lasciato largo spazio all’impiego della tecnologia. Oggi, la maggior parte delle grandi industrie (se non tutte) sono basate su processi automatizzati attuati con l’utilizzo di macchinari e robot che possono compiere il lavoro precedentemente compiuto dall’uomo.
Guardiamo il lato positivo della situazione!
Un robot non percepisce sintomi di stanchezza, non ha bisogno di riposarsi, non chiede ferie e non arriva in ritardo al lavoro.
Infatti, il termine “Robot” deriva dall’antico slavo ecclesiastico “rabota” che significa servitù, e sta ad indicare una macchina capace di svolgere in modo più o meno indipendente un lavoro in sostituzione dell’uomo.
Certo, il “cervello” del robot è sempre creazione della nostra brillante mente umana e per ora è veramente impensabile il fatto riuscire ad equiparare in tutto e per tutto le potenzialità di un cervello umano.
In quest’articolo vi presentiamo un braccio robotico con diverse immagini e un video per illustrare le sue caratteristiche e funzionalità, per passare poi ad una piccola guida da seguire per realizzarlo in casa.
Avete mai voluto costruire un robot? Credo che per molti la risposta sia “SI”, allora leggete l’articolo e fatelo con noi.
Presentazione progetto:
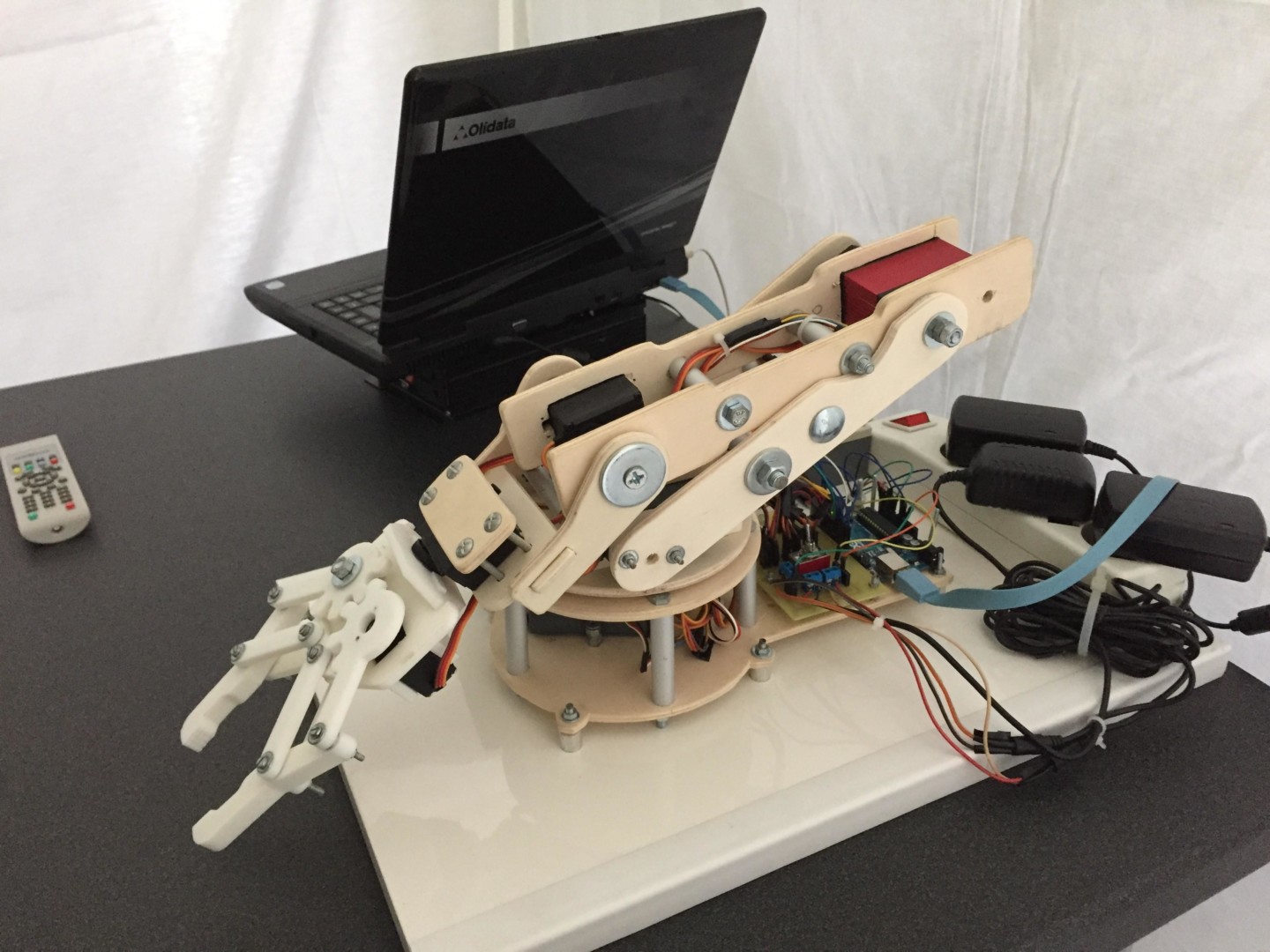
Il robot in questione è un braccio robotico con 6 DOF(degrees of freedom/gradi di libertà) basato su una board Arduino UNO( anche se è stata successivamente sostituita con una board Arduino MEGA 2560 R3).

Il progetto è stato realizzato quasi completamente a mano! Infatti la struttura fisica del robot è costruita in pioppo multistrato tagliato a mano con l’utilizzo di un archetto da traforo. Invece, la “pinza” è l’unica parte non realizzata “a mano” in quanto è stata stampata in PLA con l’utilizzo di una stampante 3D.
Il robot è basato, come già detto, su 6 gradi di libertà, attuabili con l’utilizzo di sette servomotori:
- n°3 x HK15338 Giant MG Digital Servo 175g / 25kg / 0,21sec;
- n°3 x Turnigy TGY-S902 Metal Gear Digital Robot Servo 58g / 13Kg / 0,14sec;
- n°1 x Turnigy 1270HV Digital Servo 170g / 35Kg / 0,20sec.
E’ importante sapere che dei servo motori così potenti con una coppia elevata necessitano un’elevata corrente allo spunto e generalmente una tensione di alimentazione di 5V / 6V.
Infatti, per fornire la giusta alimentazione ai diversi servomotori sono stati utilizzati 3 alimentatori:
- n° 1 x alimentatore 5V / 3A;
- n° 2 x alimentatore 6V / 2,5A.
Per la gestione delle diverse alimentazioni e dei diversi LED e ricevitore infrarossi, è stata progettata e realizzata un PCB, dove è stato inserito un deviatore quadripolare per poter dare continuità od interrompere le quattro alimentazioni contemporaneamente(i tre alimentatori e l’alimentazione di Arduino stesso).
Passando al funzionamento del robot, arriva l’aspetto veramente interessante in quanto sono presenti svariate modalità di controllo:
- AUTOMAZIONE: in questa modalità di controllo viene dato l’input per avviare l’automazione attraverso un telecomando. Il robot esegue dei movimenti preimpostati effettuato una simulazione di un processo di inscatolamento industriale;
- CONTROLLO VOCALE: in questa seconda modalità di controllo è possibile controllare il robot attraverso dei comandi vocali, attraverso alcune frasi in lingua inglese preimpostate nella fase di programmazione in Python con l’utilizzo del software MyRobotLab;
- POTENZIOMETRI: per il controllo dei sei gradi di libertà su cui è basato il robot è possibile inoltre utilizzare una scatoletta nella quale sono stati inseriti sei potenziometri che permettono di controllare i movimenti del braccio per ogni singolo grado;
- INFRAROSSI: un altro metodo di controllo è effettuato con l’utilizzo di un telecomando infrarossi che permette, oltre ad effettuare i diversi movimenti, il controllo e la scelta dei diversi metodi di controllo;
- CONTROLLO VIA WEB: quest’ultimo metodo di controllo è veramente molto interessante(anche se non è presente nel video illustrativo sottostante) e consiste nel controllo del robot attraverso qualsiasi dispositivo dotato di una connessione internet e di un display per la visualizzazione dell’interfaccia grafica scritta nell’IDE di Arduino con utilizzo dei linguaggi HTML e CSS. Questo metodo di controllo risulta un po’ più complicato ma con un po’ di impegno per la sua realizzazione, il tutto diventa molto interessante. In pratica, la board Arduino viene utilizzata come server e viene collegata al router con l’utilizzo di una Ethernet Shield. Quindi caricando lo sketch su Arduino è direttamente possibile accedere nella rete locale alla pagina caratterizzata da un determinato indirizzo IP.
Successivamente è stata anche implementata la funzione di controllo del sito da remoto, precedentemente gestito solo in locale, attraverso un dispositivo con connessione GSM/GPRS come un qualsiasi smartphone o un qualsiasi PC o laptop collegato alla rete geografica.
VIDEO:
GUIDA ALLA REALIZZAZIONE DEL ROBOT
Spesso effettuando diverse ricerche nel web può diventare divenire difficile trovare una buona strada da seguire per la realizzazione di un progetto.
Noi vi illustriamo la giusta strada da seguire per la realizzazione di un braccio robotico!
Buona realizzazione!
Dunque, in primis, elenchiamo un po’ di materiale che troverà fondamentale utilizzo nella realizzazione del robot:
- Arduino Mega: la board Arduino è il cervello del robot ed è solo grazie a lui che può effettuare movimenti e quant’altro. Come già detto precedentemente è consigliabile utilizzare la versione MEGA di Arduino per mantenere una certa scalabilità del sistema, per non avere problemi con eventuali futuri ampliamenti del progetto(grazie al maggior numero di pin presenti sullo stesso) e per avere una maggiore potenza di calcolo fondamentale per diverse applicazioni, come il controllo del robot via web con l’utilizzo della Ethernet Shield;
- Lastre di legno multistrato: nel progetto recensito è stato utilizzato pioppo multistrato dello spessore di 6mm (ma è consigliato l’utilizzo di legno più rigido);
- Bulloni, dadi e viti assortite: occorrono diversi perni e viti di varie dimensioni per il montaggio della struttura fisica, che possono variare a seconda delle dimensioni scelte per la realizzazione del braccio robotico;
- Tubi vuoti di alluminio: vengono posti intorno ai perni per mantenere le varie distanze tra le parti del robot;
- Servomotori: sono utilizzati sette servomotori:
- n°3 x HK15338 Giant MG Digital Servo 175g / 25kg / 0,21sec;
- n°3 x Turnigy TGY-S902 Metal Gear Digital Robot Servo 58g / 13Kg / 0,14sec;
- n°1 x Turnigy 1270HV Digital Servo 170g / 35Kg / 0,20sec.
Nonostante il braccio robotico sia basato su sei gradi di libertà, il robot è costituito da sei servomotori in quanto sulla base ve ne sono montati due dovendo sopportare un peso, e quindi generare una coppia, maggiore degli altri.

- Alimentazione: i servomotori richiedono una corrente piuttosto elevata e per questo per il robot sono utilizzati tre alimentatori:
- n° 1 x alimentatore 5V / 3A;
- n° 2 x alimentatore 6V / 2,5A.
D’altro canto è comunque consigliabile utilizzare un alimentatore da banco che fornisca come output 5V/6V fissi con corrente regolabile a seconda delle vostre esigenze. Facendo in questo modo potete anche evitare di impazzire sullo sbroglio circuitale per la realizzazione del PCB che avendo un’alimentazione generale diventerebbe molto più semplice.
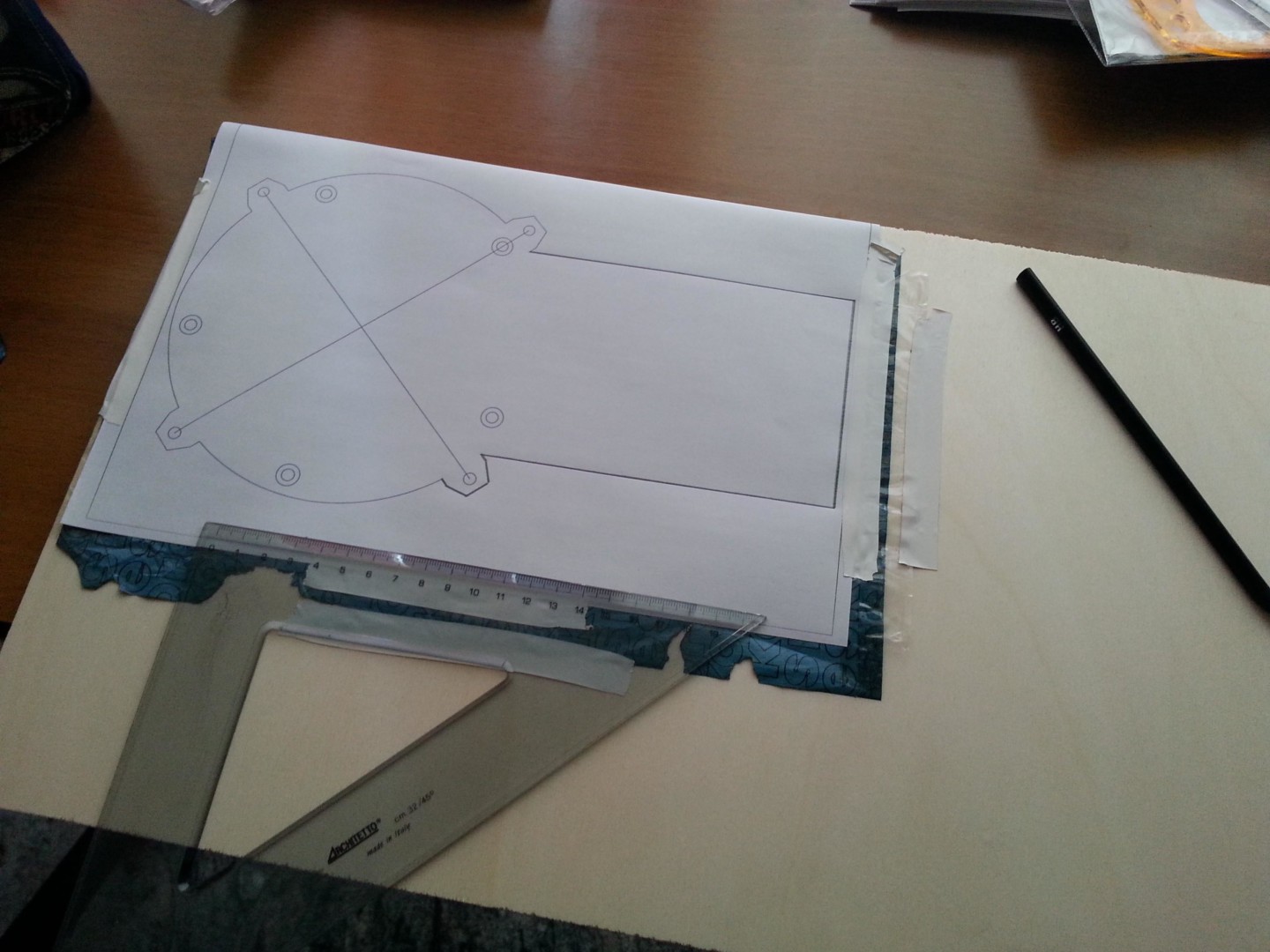
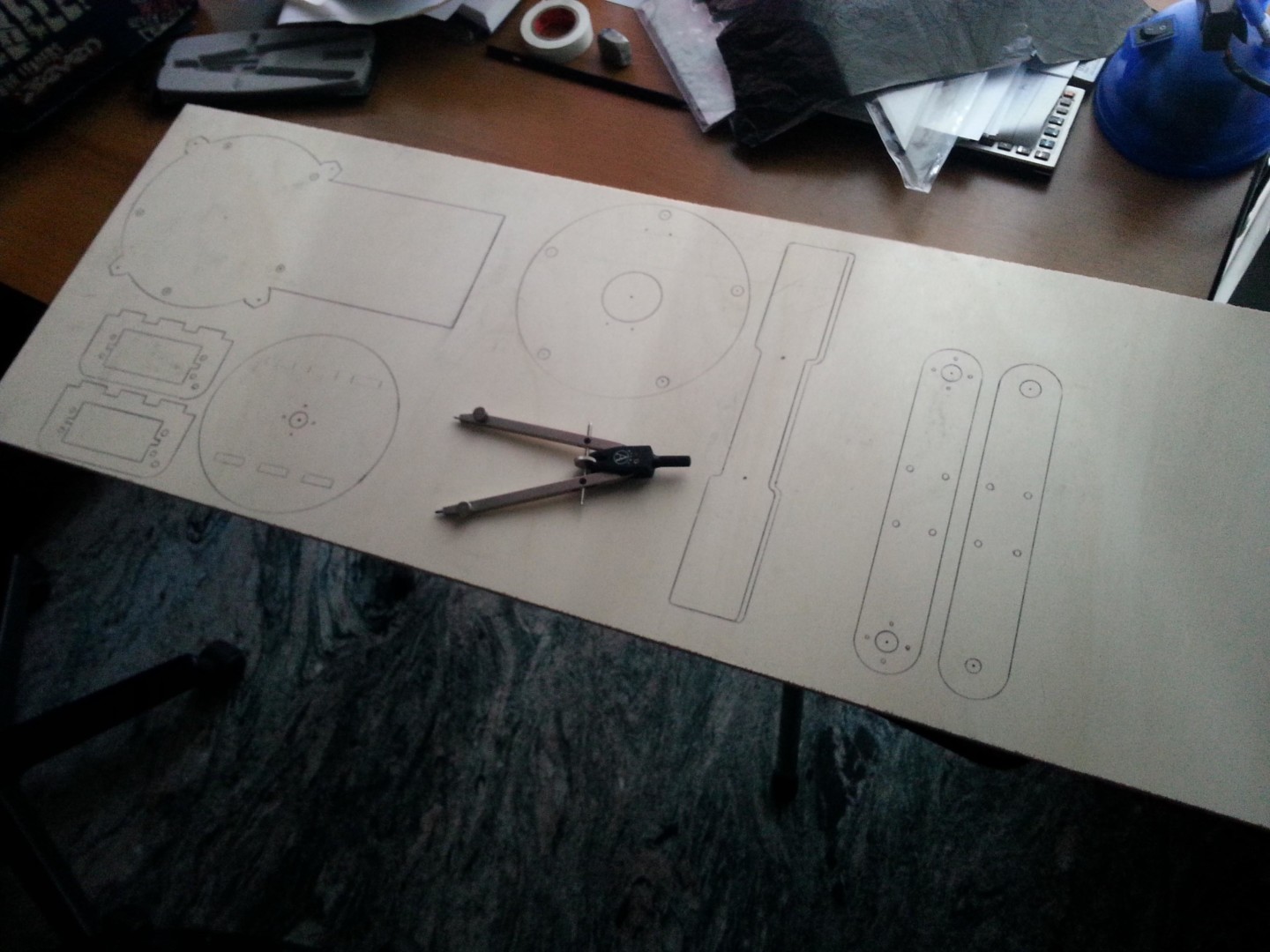
- Attrezzi per disegno e taglio: una volta progettate le diverse parti, potete scegliere due strade, quella più semplice, precisa, ma più costosa è quella di contattare qualcuno in possesso di una fresa CNC e fate tagliare i pezzi del robot con il laser; altrimenti adottate la strada del vero e proprio fai da te con l’utilizzo di squadre, matita, carta copiativa, nastro adesivo ed archetto da traforo;
- Attrezzi vari: saldatore, dremel, trapano, cacciaviti di diverse dimensioni e diverse punte, chiavi esagonali;
- Componenti: Jumpers(per i vari collegamenti tra la board e gli utilizzatori), pin headers male and female(per collegare i servo al PCB), deviatore quadripolare(se utilizzate i tre alimentatori come nel progetto)/deviatore bipolare(se utilizzate un alimentatore stabilizzato da banco);
- Software: avrete bisogno anche di diversi software per la realizzazione del vostro braccio robotico:
- Arduino IDE: per la programmazione del microcontrollore e, quindi, per la gestione di tutti i processi;
- Autocad: noto software per la progettazione grafica, utilizzato per la progettazione e designazione delle diverse parti del robot;
- Eagle: se avete intenzione di progettare anche il PCB è necessario disporre di questo software o di altri simili.
Metodi di controllo – Materiale necessario
Per quanto riguarda i diversi metodi di controllo è consigliabile, per iniziare, scegliere solo uno dei diversi elencati per testare il giusto funzionamento del tutto, per poi passare alla realizzazione delle più svariate modalità di controllo.
Elenco materiale correlato ai diversi metodi di controllo:
- Ricevitore/Trasmettitore Infrarossi: per trasmettitore infrarossi viene inteso un qualsiasi telecomando infrarossi(come quelli per TV, decoder, etc.). Per il ricevitore potete acquistare un TSOP1738 o rimuoverne uno già presente in qualche dispositivo fuori uso;
- Potenziometri: 6 potenziometri da 10K.
- Software “MyRobotLab”: è un software scaricabile gratuitamente dal sito ufficiale www.myrobotlab.org nella sezione “download”. Quest’ultimo è un software basato su dei servizi ed offre un’interfaccia grafica attraverso la quale è possibile gestire diversi utilizzatori di arduino e, con lo stesso, nel progetto recensito è stato possibile gestire il controllo vocale attraverso un piccolo script in Python.
PASSI DA SEGUIRE
Giunti a questo punto, abbiamo acquisito una infarinatura generale per quanto riguarda la costruzione del nostro braccio robotico e dovremmo quindi essere in grado di seguire i passi che seguono per realizzarlo:
- PASSO 1:
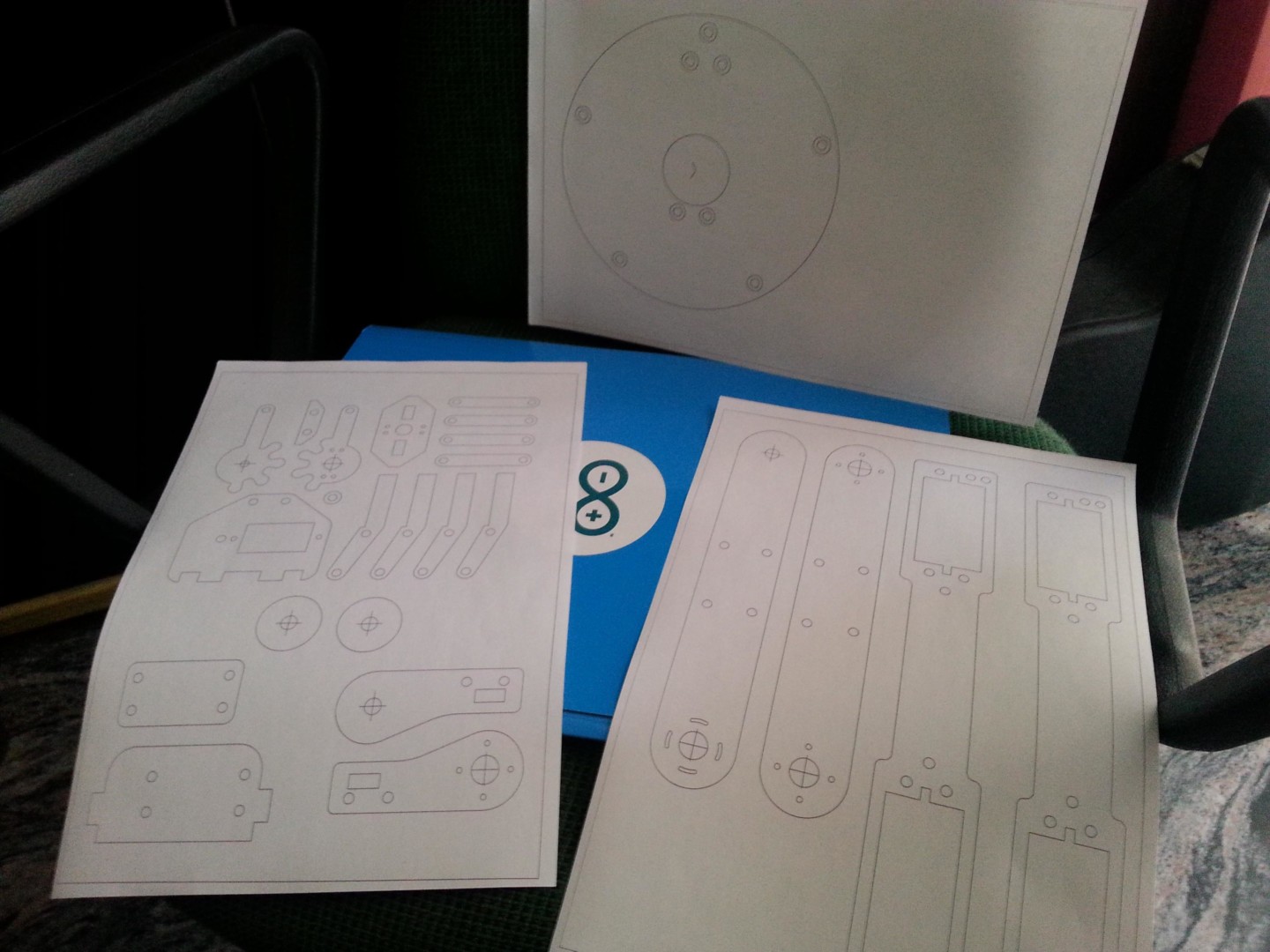
La prima fase è quella della progettazione, quindi, è necessario utilizzare il software Autocad per realizzare a vostro piacimento le parti del robot oppure potete scaricare dal web pezzi già pronti per essere tagliati (se ne trovano di diverso tipo).
Come scritto nell’elenco del materiale, in “attrezzi per disegno e taglio”, è possibile seguire due strade diverse giunti a questo punto; se riuscite, con il taglio al laser riuscite ad avere un taglio molto più efficace e preciso, altrimenti adoperate il metodo della stampa del progetto su carta e con carta copiativa(e tanta volontà) disegnate il progetto su legno e lo tagliate con archetto da traforo(come fatto per il robot recensito).


A presto per la seconda parte...
Ringraziamenti dalla Redazione:
La redazione si congratula con Andrea la bellissima realizzazione e facciamo i migliori auguri per un futuro da professionista del nostro settore, le premesse sono buone 🙂
Autore: Andrea Trufini
Biografia autore: Sono sempre stato un appassionato di elettronica, robotica e informatica e, infatti, fin da piccolo cercavo di cimentarmi nell'ambiente. Ho 19 anni e ho appena dato l'esame di maturità ottenendo una votazione di 100/100esimi, forse anche grazie alla presentazione di un robot da me costruito. Sono ora diventato studente del Politecnico di Torino, nella facoltà di Ingegneria Elettronica.
Continuo con la speranza di diventare, un giorno, un ricercatore nella materia.
Lascia una Risposta
Devi essere connesso per inviare un commento.

ottimo progetto, vorrei realizzarlo grazie alla mia stampante 3d anet a8 e sfruttare però il nunchuck della nintendo per pilotare i vari servo motori, ora aspetto con ansia la seconda parte 😉
La seconda parte è qui:
https://www.elettronicaclub.eu/braccio-robotico-con-arduino-seconda-parte/